- Blokové schéma regulované soustavy a regulátoru
- Popis veličin regulačního obvodu a vysvětlení jednotlivých bloků
- Zjednodušené schéma regulačního obvodu
- Vysvětlit na příkladu regulaci
- Řízení a ovládání blokové schéma
- Regulace na konstantní hodnotu, regulace programová, vlečná a servomechanismy.
Blokové schéma regulované soustavy a regulátoru
Regulovaná soustava
-
Jedná se o zařízení, na kterém se regulace provádí. Dělení na: statická, astatická. Samočinně uskutečňuje regulaci.

-
[y] – Regulovaná veličina (skutečná hodnota) – Výstupní veličina z regulované soustavy.
-
[u] – Akční veličina – Výstupní veličina z regulátoru a současně vstupní veličina do regulované soustavy.
-
[x] – Regulovaná veličina – Jedná se o vstupní veličinu do regulátoru. Upravována podle daných podmínek (hladiny vody, teploty v peci).
-
[d] – Poruchová veličina – Negativní vlivy, které působí na regulovanou soustavu.
Regulátor
- Zařízení, které samočinně uskutečňuje regulaci.
- Parametry: rychlost, přesnost. W

- [R] – Regulátor
- [e] – Regulační odchylka – Rozdíl mezi požadovanou a skutečnou hodnotou e=w-y.
- [w] – Řídící veličina – Je veličina, která nastavuje žádanou hodnotu regulované veličiny.
- [u] – Akční veličina – Výstupní veličina z regulátoru a současně vstupní veličina do regulované soustavy.
- [x] – Regulovaná veličina – Jedná se o vstupní veličinu do regulátoru. Upravována podle daných podmínek (hladiny vody, teploty v peci).
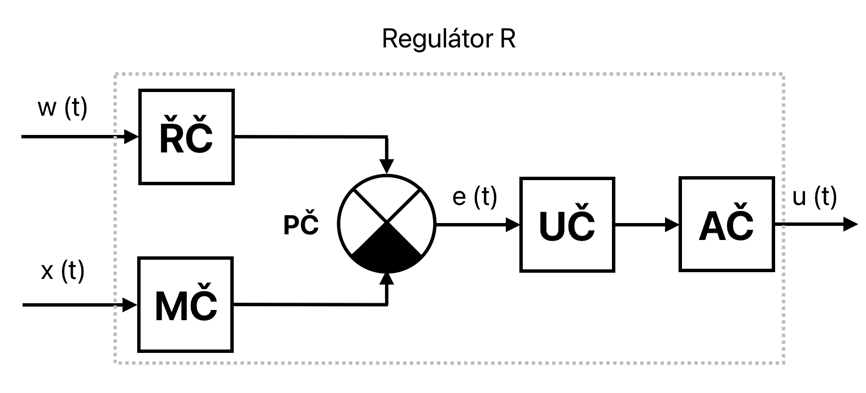
- ŘČ (Řídící člen)
- Slouží pro nastavení žádané hodnoty.
- MČ (Měřící člen)
- Slouží pro určení skutečné hodnoty regulované veličiny [x] z regulované soustavy.
- PČ (Porovnávací člen/Komparační člen)
- Porovnává skutečnou hodnotu a žádanou hodnotu regulované veličin [x].
- AČ (Akční člen)
- Nastavuje hodnotu akční veličiny [u]. Je na konci řetězce.
- UČ (Ústřední člen)
- Zpracovává regulační odchylku [e].
Popis veličin regulačního obvodu a vysvětlení jednotlivých bloků
Regulační obvod
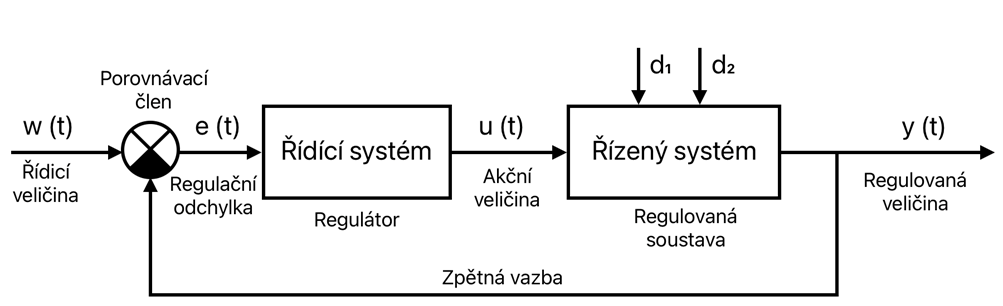
Porovnávací člen
- (Porovnávací člen/Komparační člen)
- Porovnává skutečnou hodnotu a žádanou hodnotu regulované veličin [x].
Regulátor
viz - Regulátor
Regulovaná soustava
viz - Regulovaná soustava
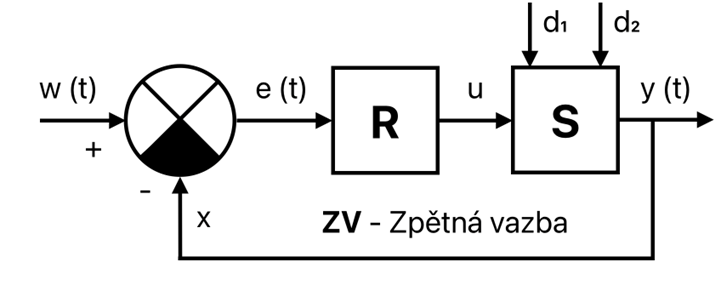
Zpětná vazba
-
ZV – Část výstupních signálů se přivádí zpět na vstup, zařízení kontroluje svoji činnost.)
-
Typy zpětných vazeb:
- Kladná zpětná vazba
- Záporná zpětná vazba
- Dopředná zpětná vazba
-
[y] – Regulovaná veličina (skutečná hodnota) – Výstupní veličina z regulované soustavy.
-
[u] – Akční veličina – Výstupní veličina z regulátoru a současně vstupní veličina do regulované soustavy.
-
[d] – Poruchová veličina – Negativní vlivy, které působí na regulovanou soustavu.
-
[e] – Regulační odchylka – Rozdíl mezi požadovanou a skutečnou hodnotou e=w-y.
-
[w] – Řídící veličina – Je veličina, která nastavuje žádanou hodnotu regulované veličiny.
Funkce celého obvodu
- Uživatel nastaví žádanou hodnotu w(t).
- Porovnávací člen vypočítá regulační odchylku e(t).
- Regulátor na základě e(t) vypočítá akční zásah u(t).
- Akční člen (součást řízeného systému) provede fyzický zásah.
- Řízený systém je ovlivněn jak akční veličinou, tak poruchami d1, d2.
- Výstupní veličina y(t) je měřena a vrací se do porovnávacího členu (zpětná vazba).
- Celý proces se opakuje, dokud není regulační odchylka minimální.
Zjednodušené schéma regulačního obvodu
Vysvětlit na příkladu regulaci
- Regulace výšky hladiny
`
Funkce
- Nastavíme žádanou hodnotu (w) – například požadovanou hladinu vody v nádrži.
- Snímač neustále měří skutečnou hodnotu (y) – tedy aktuální hladinu.
- Porovnávací člen vypočítá rozdíl mezi tím, co chceme (w), a tím, co skutečně je (y). Tento rozdíl je regulační odchylka (e).
- Regulátor na základě této odchylky rozhodne, jak má akční člen zasáhnout – například otevře ventil, aby přiteklo víc vody, nebo ho přivře, když je hladina moc vysoká.
- Akční člen provede fyzický zásah do systému.
- Celý proces běží pořád dokola – když se objeví nějaká porucha (například někdo odebere vodu), systém na to automaticky zareaguje a snaží se vrátit hladinu na požadovanou hodnotu.
Činnost částí
-
Žádaná hodnota (w): To je hodnota, kterou chceme udržovat – nastavená hladina vody.
-
Porovnávací člen: Porovnává žádanou hodnotu (w) se skutečnou hodnotou (y), kterou měří snímač. Výsledkem je regulační odchylka (e = w – y).
-
Regulátor: Zpracovává regulační odchylku a podle její velikosti a směru rozhodne, jak má zasáhnout do systému. Otevře nebo zavře ventil, zapne nebo vypne topení atd.
-
Akční člen: Fyzicky provádí zásah podle pokynu regulátoru – pohybuje ventilem, který reguluje přítok vody.
-
Regulovaná soustava: To je samotné zařízení, které regulujeme – nádrž s vodou.
-
Snímač: Měří skutečnou hodnotu regulované veličiny (aktuální hladinu vody) a posílá ji zpět do porovnávacího členu.
-
Poruchové veličiny (d): Vnější vlivy, které působí na regulovanou soustavu a snaží se ji vychýlit z požadované hodnoty (kolísání přítoku, změny tlaku, odběry apod.).
Řízení a ovládání blokové schéma
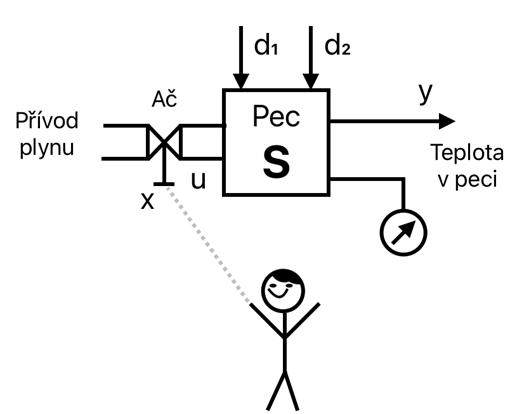
Řízení ovládáním
- Nemá zpětnou vazbu (ZV – Část výstupních signálů se přivádí zpět na vstup, zařízení kontroluje svoji činnost.).
-
Veličinu [u] nastavujeme ručně.
-
Hodnotu [y] získáme měřením (vhodným měřícím přístrojem).
Řízení regulací

[R] – Regulátor – Zařízení, které samočinně uskutečňuje regulaci [w] – Řídící veličina – Je veličina, která nastavuje žádanou hodnotu regulované veličiny. [x] – Regulovaná veličina – Jedná se o vstupní veličinu do regulátoru. Upravována podle daných podmínek (hladiny vody, teploty v peci) [e] – regulační odchylka – Rozdíl mezi požadovanou a skutečnou hodnotou e = w–y [u] – Akční veličina – Výstupní veličina z regulátoru a současně vstupní veličina do regulované soustavy [y] – Skutečná hodnota regulované veličiny – Výstupní veličina z regulované soustavy
Regulace na konstantní hodnotu, regulace programová, vlečná a servomechanismy.
Regulace na konstantní hodnotu
- V praxi je nejčastější případ regulace na konstantní hodnotu. Při ní se regulovaná veličina udržuje na konstantní hodnotě – zde je w = konst i y = konst. Je to např. regulace teploty v místnostech, otáček strojů anebo již 22 vzpomenutá a uváděná regulace výšky hladiny. U tohoto typu regulace je zvláště důležitá kompenzace vlivu poruchových veličin. Kdyby nebylo poruchových veličin, nic by se v podstatě nedělo a nemuselo by se regulovat (kromě občasné změny požadované hodnoty regulované veličiny).
Regulace programová
- Je to taková regulace, kde požadujeme, aby se regulovaná veličina měnila v předepsaných velikostech v předepsané časové závislosti – regulovaná veličina je funkcí času w = f(t) i y = f(t). Příkladem je regulace teploty v pecích, kde se teplota musí podle časového programu měnit.
Regulace vlečná
- Je to regulace, při níž se regulovaná veličina mění v závislosti na jiné vnější fyzikální veličině. Hodnota regulované veličiny má změny této vnější veličiny rychle a přesně sledovat. Matematicky vyjádřeno w = f(A), y = f(A), kde A je právě onou vnější veličinou. Příkladem je dávkování chemikálie do vody, kdy požadujeme změnu množství dávkované chemikálie v závislosti od okamžitého průtočného množství vody.
Regulace servomechanismy
- Zvláštním případem vlečné regulace jsou servomechanismy. U nich se řídicí veličina nemění v závislosti na jiné fyzikální veličině, ale je měněna buďto ručně anebo nějakým zařízením. Regulovaná veličina ji pak věrně a přesně sleduje. Příkladem takového servomechanismu je posilovač řízení v automobilech, ovládání kormidel v lodích i letadlech apod. U servomechanismů ovšem není rozdělení regulačního obvodu na regulátor a regulovanou soustavu.
Reflexe
Tato otázka se mi vypracovávala dobře, protože jsem měl dobré zdroje ze kterých čerpat. Ať už mé zápisky ze školy nebo materiály poskytnuté učitelem.